


Construa Um Drone “Do Zero”! – Parte 3
Continuando nossa série sobre a criação de um drone quadricóptero, vamos falar sobre mais dois dos componentes principais: as hélices e os ESC’s (Controladores Eletrônicos de Velocidade).





Os padrões mais comuns de diâmetro e o passo (distância que a hélice deslocaria transversalmente ao completar uma volta) das hélices encontradas no mercado são:

O modelo EPP1045, por exemplo, indica que a hélice possui um diâmetro de 10″ e tem um passo de 4.5″. Este segundo valor indica que, se essa hélice der uma volta completa, horizontalmente (como na figura acima), ela terá se deslocado 4.5″. Parte da energia fornecida à hélice pelo motor é “perdida”, portanto, existe um passo teórico (ou geométrico, que é a distância teórica que a hélice deveria percorrer) e um passo efetivo (que é a distância real percorrida por uma revolução da hélice). A diferença entre o passo teórico e o passo efetivo é denominada recuo (slip).
Uma taxa de RPM maior da hélice daria mais velocidade e mais versatilidade às manobras, mas isso é limitado pela quantidade de peso que será capaz de sustentar para um dado consumo de energia. O consumo de energia pelo motor aumenta na medida do aumento da área efetiva da hélice, então diâmetro maior ou pitch maior demandam maior consumo de energia para uma mesmo taxa de rotação, mas também produzem muito mais impulso e terão maior capacidade de carga.
A escolha deve privilegiar um equilíbrio entre motor e hélice, para que o quadricóptero seja capaz de fazer o que queremos que ele faça. Se queremos realizar voos mais estáveis com o objetivo de capturar imagens, deveríamos provavelmente usar um motor que gerencia menos revoluções, mas que provê mais torque e hélices com maior diâmetro e maior valor de pitch (que usam mais torque para mover mais ar e criar maior sustentação). O tamanho da estrutura (frame) do veículo também deve ser considerado.
Os motores brushless têm, normalmente, 3 fases, então uma alimentação direta por uma fonte DC não girará os motores. É nessa hora que os ESCs entram em cena. Eles são capazes de gerar 3 sinais de alta frequência com diferentes, mas controláveis fases, continuamente, para o manter o motor girando. Os ESCs também têm a capacidade de fornecer a quantidade de corrente que o motores podem demandar.
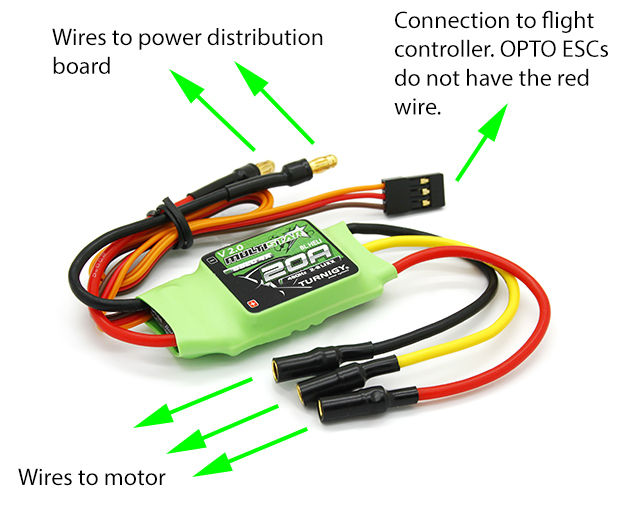
Eletronic Speed Controller
Em termos de hardware, um ESC é uma placa controladora para motores, que possui uma entrada para a bateria e três saídas, correspondentes às fases do motor. Cada ESC é controlada independentemente por um sinal PPM (similar a um PWM). A frequência do sinal também varia, mas para um quadricóptero é recomendado que o controlador seja capaz de suportar sinais de frequência altos o suficiente, então as velocidades do motor podem ser ajustadas suficientemente rápido, para manter uma boa estabilidade (mínimo 200Hz ou 300Hz de sinal PPM). Também podem ser controlados através da interface I2C, mas esses controladores são muito caros.
As três conexões que saem do ESC podem ser plugadas no motor em qualquer ordem. Para inverter a direção para a qual um motor está girando, você precisa trocar dois dos fios.


Muitos ESCs vêm com um Circuito de Eliminação de Bateria (Battery Elimination Circuit-BEC). Os BECs reduzem a voltagem da bateria a um nível que o controlador de voo e o receptor de rádio do quadricóptero possam usar.
As Hélices
Em cada motor do drone quadricóptero, é fixada uma hélice. As hélices não podem ser todas iguais, como já mencionamos no primeiro post. Num quadricóptero, devemos ter sempre um par de hélices voltado para a direita e um par voltado para a esquerda que precisam ser instaladas nos motores corretos. Isso é necessário para que, associadas aos pares de motores, um com sentido horário e outro com sentido anti-horário, o quadricóptero tenha a capacidade de estabilizar sua rotação Yaw, que é a rotação em torno de si mesmo. Essa é a mesma razão pela qual um helicóptero tem uma hélice pequena na calda. Sem ela, o veículo ficaria girando sem controle, em torno do centro da hélice superior.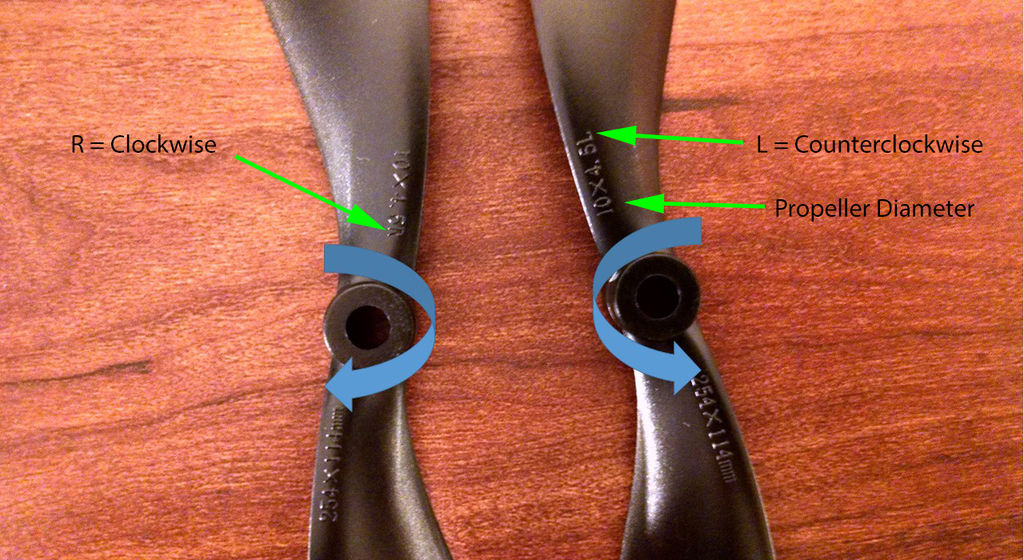
Um par de hélices com sentidos de giro opostos.
Tipos
Materiais
As hélices encontradas no mercado, frequentemente são de plástico (ou nylon) e vêm com diferentes tamanhos (ou diâmetros) e diferentes passos (pitch), também podem ser de fibra de vidro, fibra de carbono com resina ou de um composto de nylon e carbono em pó ou até madeira. As diferenças se refletem basicamente no preço, na flexibilidade e na resistência a choques (em caso de queda ou colisão do drone). Uma comparação entre as hélices de fibra de carbono e as hélices de plástico pode ser vista aqui ou aqui.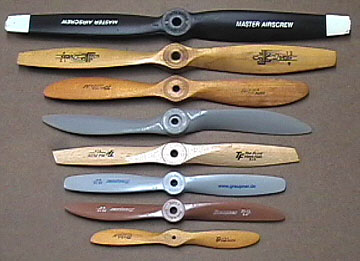
Diferente tipos de hélices.

Hélices de fibra de carbono.
Formato Das Pás
Em se tratando de veículos multirotores, o mercado normalmente oferece dois tipos de hélices, com formatos diferentes de pás: as Slow Flyer Propeller e as Electric Propeller. Esses formatos diferentes dão às hélices propriedades distintas em relação ao consumo de energia e características de voo. As hélices Slow Flyer têm as extremidades das pás mais largas e vão se estreitando quanto mais próximo do centro. As Electric Propellers (mais indicadas para multirotores) têm um formato diferente, onde a parte central das pás é mais larga e as extremidades afuniladas.
Slow Flyer Propeller

Electric Propellers
Slow Flyer
As hélices Slow Flyer são mais indicadas, como o próprio nome indica, para voos em baixa rotação. A distribuição de peso (referente ao centro de gravidade) é maior nas extremidades, o que demanda maior força para efetuar uma rotação. Isso se reflete num consumo maior de corrente, para uma mesmo rotação. As Electric alcançam rotações muito maiores e garantem mais sustentação aos multirotores, porque deixa o centro de gravidade mais centralizado. Como as extremidades são mais estreitas, o motor faz menos força para completar um giro da hélice. No vídeo abaixo é possível entender melhor as diferenças.Tamanhos: Diâmetro E Pitch
O tamanho das hélices terá um efeito direto sobre o ruído emitido pelo drone, seu tempo de voo e seu desempenho de voo. Grandes hélices são mais indicadas para quadricópteros de estrutura Utility, porque fazem menos ruído e dão maior tempo de voo. As hélices pequenas são mais indicadas para quadricópteros de estrutura Racing, porque darão ao drone maior versatilidade nas manobras.Os padrões mais comuns de diâmetro e o passo (distância que a hélice deslocaria transversalmente ao completar uma volta) das hélices encontradas no mercado são:
- EPP1045 (diâmetro igual a 10″ e pitch igual a 4.5″): é uma das mais populares, boa para quadricópteros de tamanho médio;
- AOC 1047 (diâmetro igual a 10″ e pitch igual a 4.7″): muito similar ao modelo anterior;
- EPP0845 (diâmetro igual a 8″ e pitch igual a 4.5″): regularmente usada em quadricópteros menores;
- EPP1245 (diâmetro de 12″ e pitch igual a 4.5″): usada em quadricópteros maiores, quando se quer mais impulso;
- EPP0938 (diâmetro de 9″ e pitch igual a 3.8″): usada em quadricópteros menores;
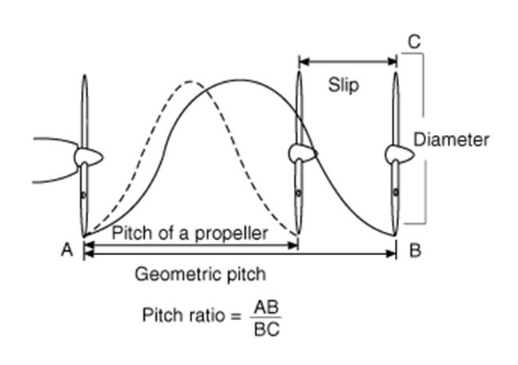
Diâmetro e passo (pitch)
O modelo EPP1045, por exemplo, indica que a hélice possui um diâmetro de 10″ e tem um passo de 4.5″. Este segundo valor indica que, se essa hélice der uma volta completa, horizontalmente (como na figura acima), ela terá se deslocado 4.5″. Parte da energia fornecida à hélice pelo motor é “perdida”, portanto, existe um passo teórico (ou geométrico, que é a distância teórica que a hélice deveria percorrer) e um passo efetivo (que é a distância real percorrida por uma revolução da hélice). A diferença entre o passo teórico e o passo efetivo é denominada recuo (slip).
Tamanho E Inclinação Das Pás
Duas regras básicas, relacionadas ao tamanho e inclinação das pás das hélices, na escolha de hélices para um projeto são:- Com maior valor de diâmetro e de pitch, mais impulso pode ser gerado. Requer maior consumo de energia, mas tem maior capacidade de carga (sustentar peso);
- Quando utilizar motores com mais alta capacidade de rotações (RPM’s), optar por hélices menores ou de tamanho médio. Quando utilizar motores de baixa taxa de RPM, optar por hélices maiores, ou poderá haver problemas em manter o veículo no ar em baixas velocidades.
Uma Análise Entre A Inclinação Das Hélices, Diâmetro E RPM
Pitch vs Diâmetro: o diâmetro basicamente mede a área, enquanto o pitch mede a “área efetiva”. Com o mesmo diâmetro, hélices com pitch maior poderiam gerar mais impulso e sustentar mais peso, mas consumindo mais energia.Uma taxa de RPM maior da hélice daria mais velocidade e mais versatilidade às manobras, mas isso é limitado pela quantidade de peso que será capaz de sustentar para um dado consumo de energia. O consumo de energia pelo motor aumenta na medida do aumento da área efetiva da hélice, então diâmetro maior ou pitch maior demandam maior consumo de energia para uma mesmo taxa de rotação, mas também produzem muito mais impulso e terão maior capacidade de carga.
A escolha deve privilegiar um equilíbrio entre motor e hélice, para que o quadricóptero seja capaz de fazer o que queremos que ele faça. Se queremos realizar voos mais estáveis com o objetivo de capturar imagens, deveríamos provavelmente usar um motor que gerencia menos revoluções, mas que provê mais torque e hélices com maior diâmetro e maior valor de pitch (que usam mais torque para mover mais ar e criar maior sustentação). O tamanho da estrutura (frame) do veículo também deve ser considerado.
Os Controladores Eletrônicos De Velocidade (ESCs)
Num drone quadricóptero, você precisará de 4 Electronic Speed Controllers (1 para cada motor). Basicamente, os ESCs controlam a potência do motores, “dizendo” a eles o quão rápido devem girar.Os motores brushless têm, normalmente, 3 fases, então uma alimentação direta por uma fonte DC não girará os motores. É nessa hora que os ESCs entram em cena. Eles são capazes de gerar 3 sinais de alta frequência com diferentes, mas controláveis fases, continuamente, para o manter o motor girando. Os ESCs também têm a capacidade de fornecer a quantidade de corrente que o motores podem demandar.

As três conexões que saem do ESC podem ser plugadas no motor em qualquer ordem. Para inverter a direção para a qual um motor está girando, você precisa trocar dois dos fios.
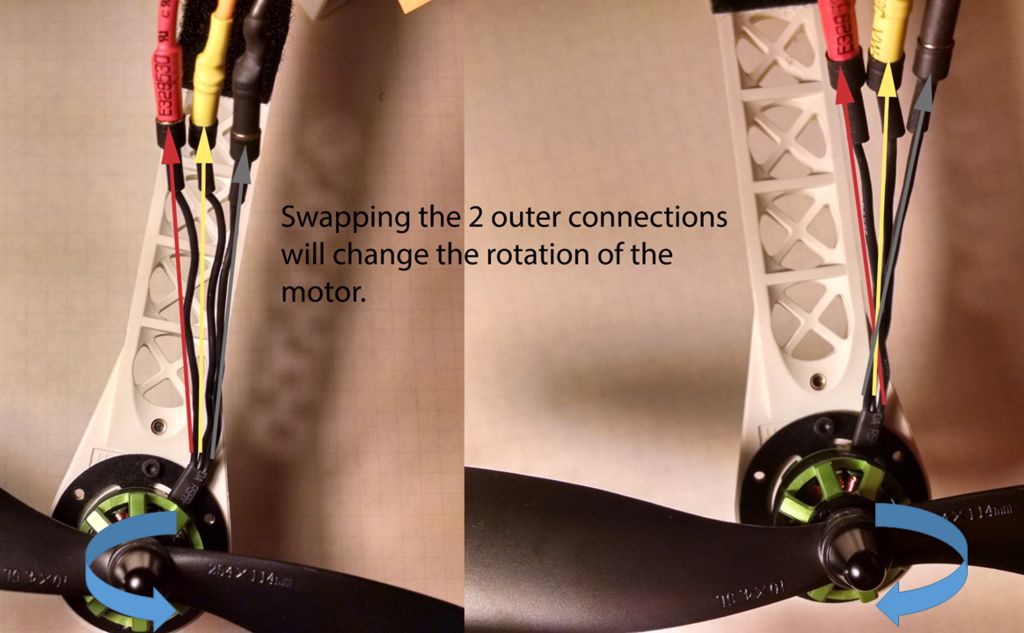
As 3 fases geradas pelo ESC conectadas ao motor.
Classificação Dos ESCs
Os ESCs são classificados por sua amperagem (ex.: 10A, 12A, 20A). Ao escolher um ESC, o fator mais importante é a fonte de corrente. Devemos sempre escolher um ESC com pelo menos 10A a mais do que a fonte de corrente, conforme o que o motor vai demandar. Um princípio básico é usar ESCs classificados para 2 vezes o que o motor pode consumir. Um segundo fator importante é a facilidade de programação, que significa que alguns podem permitir o uso de diferentes sinais de faixa de frequência que outros, que têm faixa entre 1ms a 2ms (delay do sinal).
Muitos ESCs vêm com um Circuito de Eliminação de Bateria (Battery Elimination Circuit-BEC). Os BECs reduzem a voltagem da bateria a um nível que o controlador de voo e o receptor de rádio do quadricóptero possam usar.
Tipos De ESCs
Os 3 tipos de ESCs disponíveis são:- Linear BEC: regulam a tensão, de modo que a placa controladora de voo e o receptor de rádio possam ser alimentado com segurança.
- Switching BEC: similar ao BEC linear, mas usa como método para baixar a tensão um regular chaveado.
- OPTO: esse ESC pode não possuir um BEC, o que pode exigir um fonte de alimentação extra para a controladora de voo e o receptor de rádio; no entanto, oferecem maior proteção em função do isolamento opto-eletrônico.




{kind=link}